Introduction to GPS Receiving System for Low-cost Agricultural Use
The GPS Global Positioning System is an all-weather, global, signal-wide, satellite-based radio navigation system capable of providing real-time longitude, latitude, elevation, and other positioning information. It is one of the core technologies supporting precision agriculture. GPS field area measurement The instrument plays an important role in the collection of farmland positioning information, the implementation of prescription farming, the automatic navigation system for agricultural machinery, and area measurement. Because low-cost GPS equipment on the Chinese market is unable to meet the application requirements in the agricultural field, high-precision GPS equipment has high costs because it is imported from abroad and is not conducive to promotion. Therefore, independently developing low-cost GPS for the application of precision agriculture has Significance.
Using VRS virtual difference technology can improve the positioning accuracy of GPS, broaden the application of GPS, and also make GPS devices to the direction of portable, lightweight. Foreign GPS receivers generally do not have the ability to receive VRS differential information, except for a few of Trimble's high-precision products (Trimble's 5800, R8 VRS rover). Domestic products with VRS access capabilities include the centimeter-accuracy receiver (Lingrui S82-2008) produced by Guangzhou South Surveying and Mapping Instrument Co., Ltd., and the V8 GNSS RTK series of Guangzhou Haida Surveying and Mapping Instrument Co., Ltd. For the use of GPS OEM board independent development of low-cost GPS receiver more: too static B, etc. The use of GPS OEM board developed GJS-200 series receiver, differential positioning accuracy of meters. Yang Ping discussed the communication protocol between the GPS OEM board and the SCM and achieved the data transmission between the two. Wang Qi et al. added latitude and longitude data extraction functions based on the completion of GPS OEM board and single-chip communication. Liu Xing and others realized real-time communication between GPS OEM boards and handheld computers (PDAs) and PCs. Domestic GPS is mainly used for area measurement in low-cost portable handheld forest area measurement and error analysis. The relative error of measurement depends on the measured area and the accuracy of the GPS receiver itself. The larger the measured area, the greater the relative error. small. In summary, although the accuracy of the products that can access VRS at home and abroad is very high, the price is relatively expensive, ranging from tens of thousands to several tens of thousands of yuan; the receivers independently developed using domestic OEM boards are generally simple in function, and most have no VRS access function. And do not have U disk storage and other functions, inconvenience for data processing. The area of ​​farmland is one of the most basic data in agricultural production management. The size of the field directly determines the input of production materials such as seeds, fertilizers, and pesticides. It is also the main basis for agricultural machinery to perform field operations calculations and charges. Compared with traditional measurement methods, using GPS for area measurement has the advantages of being free from area size and shape limitation, fast and accurate, saving time and labor. At present, most of the receivers used in area measurement are meters-level accuracy, and the relative error is relatively large. For a land mass of about 1 hm2, especially less than 0.1 hm2, there is relatively little analysis of the relative measurement error, which does not provide data support for the accurate measurement of farmland area.
The purpose of this study is to develop a low-cost submeter-accuracy GPS receiver (PAC-GPS) that can receive VRS differential information and analyze its accuracy in different area measurements, especially the relative error in small block area measurement. The receiver provides data support for use in precision agriculture.
1 Introduction to VRS System VRS is a kind of network RTK technology. It consists of three or more GPS reference stations that are evenly or non-uniformly distributed. It is connected to the control software of the control center through wired or wireless communication methods. After the original observation data is comprehensively processed, a corresponding spatial location information database is established and released from the information broadcasting system to provide accurate location correction data for the mobile station to perform high-precision, high-speed, real-time dynamic positioning and navigation services.
The VRS system consists of three parts: the network control center (computing center and data distribution center), the continuous operation GPS reference station and the user part. The GPS mobile station sends its approximate location to the control center.
The control center receives this information and performs an error calculation to retransmit the differential correction information to the mobile station. After the GPS mobile station corrects the actual observation value using the received differential correction information, the positioning error can reach centimeter-level accuracy. This technique of creating raw reference data for a virtual reference station that is not actually set up is called "virtual reference station technology."
The VRS system has a large coverage area and the distance between adjacent reference stations can reach 70 km. The positioning accuracy of any position within the coverage area of ​​the VRS system is always consistent and does not change with the distance between the measurement position and the reference station. The emergence of VRS technology indicates that the development of GPS has entered a new stage. It will greatly expand the application area of ​​GPS and represent the development direction of GPS.
2 Development of VACS-based PAC-GPS receivers PAC-GPS receivers include GPS-OEM module, wireless communication module, microcontroller module, U disk module, keyboard and liquid crystal display (Figure 1), including: GPS module Receiving GPS raw data; wireless communication module used to communicate with VRS control center, sending GPS raw data of current location and receiving differential data; LCD display and keyboard forming human-machine interface for selecting positioning mode, data output mode and real-time Show latitude and longitude. The system uses the ARM7 processor to control the GPS module and the GPRS module according to the selected positioning method and output method. In agricultural applications, GPS has two major functions: First, it outputs real-time location information to field computers to provide data support for variable fertilizers, variable sprays, and automatic navigation. Second, it saves location information and then performs coordinate conversion. After the calculation of farmland area and so on. Therefore, in order to meet the needs of agricultural applications, serial port output and U disk storage functions have been added to the design of PAC-GPS receivers.
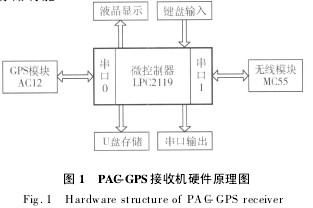
Figure 1 PAC-GPS receiver hardware schematic 2.1 Microcontroller PAC-GPS receiver microcontroller uses ARM7LPC2119, internal integrated 16 kB SRAM and 128 kB high-speed flash memory, with two UART interfaces. The main function of the microcontroller is to control the various modules in the system to work together. After power on, first start the GPS module and wireless module and initialize the LCD display module. The microcontroller receives the NMEA-0183 statement sent from the GPS module through the serial port, and extracts the latitude and longitude information sent to the LCD screen for real-time display. If the receiver works in differential mode, it needs to send AT command and local GPS location information to the wireless communication module through the serial port, receive the differential data of the wireless communication module and forward it to the GPS module.
2.2 GPS-OEM module PAC-GPS receiver GPS-OEM module selects AC12 with sub-meter accuracy produced by France Thales, can output industrial standard NMEA-0183 format data, receive RTCM format differential information And compatible with SBAS (WAAS/MSAS/EGNOS) satellite-based augmentation system. GPS module AC12 has 2 serial communication ports, serial port A and serial port B. Serial port A (TXD, RXD) receives control commands and outputs GPS data in NMEA format; serial port B (RTCM) receives differential data in RTCM format. AC12 adopts TTL level, LPC2119 can connect with it directly. In order to save the serial port resources, the receive command pin (RXD) is connected to the I/O port of the LPC2119. The LPC2119 sends control information through analog serial port timing. The RTCM and TXD pins transmit large amounts of information. To ensure correct data transmission, you need to To the standard serial port UART0.
2.3 Wireless Communication Module The wireless communication module uses Siemens MC55. The module supports voice, SMS, and fax services, and offers optional baud rates from 1.2 to 115.2 kb/s. In this study, the TCP/IP connection to the VRS control center was established using a low-cost and stable GPRS (general packet radio service) mode. GPRS is a mobile communication service developed on the basis of the GSM system. It can provide high-speed wireless IP for mobile users and establish connection services between mobile users and data networks.
The GPRS network covers a wide range, there is no space and distance limit, the use of GPRS technology can achieve data packet transceiver, users can always online, and ensure the real-time data transmission. In addition, GPRS access speed is fast, generally only 1~3 s can log on the Internet. After the connection is established, the module needs to send an NTRIP (networked transport of RTCM via internet protocol) header file to the VRS control center server to obtain the differential data source information; if the server feeds back connection success information, the MC55 sends the NMEA format/GPGGA0 statement to the server to download. Differential information.
2.4 U disk storage module U disk storage module adopts CH375M produced by Nanjing Hengsheng Electronics Co., Ltd. When the GPS receiver data output mode is set to U disk storage, the microcontroller controls the U disk read/write module through the serial port and passes the collected data to the U disk read/write module, and the U disk read/write module writes the data to U. Disk, complete data storage.
2.5 Keyboard and Liquid Crystal Display Module The keyboard uses a 4×4 determinant keyboard. The system adopts the query method to determine whether there is a key press and obtain the key value. The LCD module uses LCM128645ZK. The I/O port of the LPC2119 is connected to the LCM128645ZK through serial communication to implement control command input, character display, and clear screen operations. The keyboard and LCD module can be used in conjunction with GPS positioning and output mode selection, as well as real-time display of latitude and longitude data and status prompts.
3 Experiment and analysis The area measurement experiment was conducted on the football field of China Agricultural University (East Campus) on October 10, 2008. In order to analyze the area measurement accuracy of PAC-GPS receivers with different positioning methods and different measured areas, the areas of the football field, 70 m@54 m rectangular area and radius are respectively 5.0, 9.1, 15.0, and 20.0 m. The area is measured.
3.1 Measurement and Analysis of Rectangular Area and Circular Area Test Objectives: To analyze the area measurement accuracy of the PAC-GPS receiver when the shape and area of ​​the measured land are different.
The boundary of the plot to be measured measured with a tape measure and manually calibrated is used as a standard. The handheld PAC-GPS receiver walks around the boundary and records the trajectory information. Through the area measurement function developed by the Ministry of Education Key Laboratory of Modern Precision Agriculture System Integration Research of China Agricultural University, the area of ​​the measured land is calculated. The area measurement method is analytical method, and the unit is m2, wherein the radius is 5.0 m and Two rounds of data were measured with a circle area of ​​15.0 m. The center circle (radius 9.1 m) and radius of 20.0 m radius of the football field were measured in 3 groups respectively. The area of ​​the rectangular area was measured in 1 group (Table 1). It can be seen that the relative error of all the measured areas is not more than 2.25% at the maximum by means of multiple measurements; the measurement error of the circle area of ​​9.1 m is larger than the radius of 5.0 m, but overall, with the increase of the area Large, the measurement error is gradually reduced. When the measured area is greater than 714 m2, the relative error is less than 1%; when the measured area is approximately 3740 m2, the relative error is only 0.14%. The test data shows that the PAC-GPS receiver has high accuracy in small area measurement and can meet the requirements of farmland area measurement.
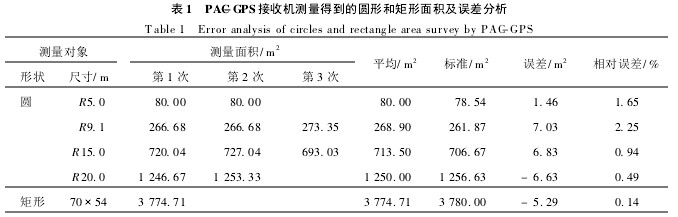
Table 1 Round and Rectangular Area and Error Analysis Measured by PAC-GPS Receiver From the PAC-GPS receiver measurement trace (Figure 2), it can be seen that the contour of the measured area boundary is linear. Although the receiver positioning accuracy using VRS differential in the measurement is sub-meter level, since the GPS positioning data has a consistent error offset with respect to the real position in a short time, the measured area boundary maintains a good outline.
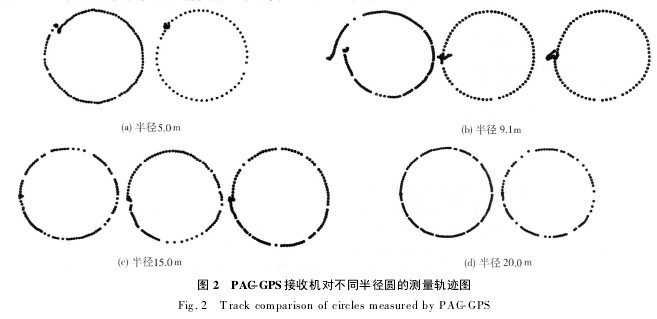
Figure 2 Measurement path of different radius circle of PAC-GPS receiver. Figure 3.2 Measurement and analysis of soccer field area Test Objective: To analyze the area measurement accuracy of PAC-GPS receiver for the same measured land under different positioning modes.
First use the Aggps 332 receiver working in RTK differential mode to walk around the football field for 1 week. Record the trajectory as the standard area of ​​the football field; then hold the PAC-GPS system developed in this project and work on the stand-alone, SBAS differential and In the VRS differential state, each lap traveled around the football field and recorded track information. The area calculation method is the same as the 3.1 test, and the results are shown in Table 2.
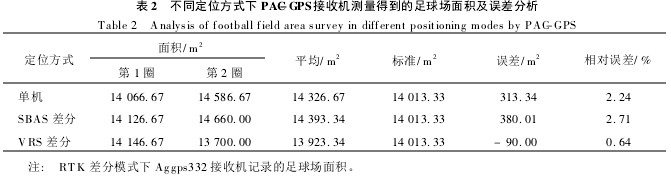
Table 2 The area and error analysis of the football field measured by the PAC-GPS receiver under different positioning modes can be seen from Table 2. The relative error of the area measured by the VRS differential positioning method is 0.64%, while the stand-alone positioning and the SBAS differential positioning method The relative error of the measured area is slightly larger, and the average relative error after 2 measurements can be controlled within 3%. Compared with other differential methods, the coincidence between the trajectory after the VRS differential and the standard trajectory is relatively good (Fig. 3). The trajectory of the stand-alone positioning method and SBAS differential positioning method deviates far from the standard trajectory. From the above analysis, no matter which kind of positioning method is used, the relative error is relatively small, which can meet the requirements of farmland area measurement.
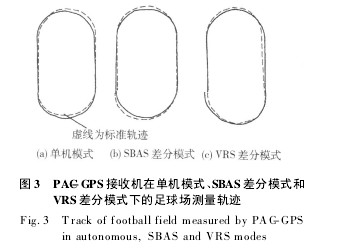
Figure 3. Football stadium measurement track of PAC-GPS receiver in stand-alone mode, SBAS differential mode, and VRS differential mode. 4 Conclusion This study uses a low-cost GPS OEM board combined with a wireless communication module to develop a set of differential information that can receive VRS. GPS receiving system. The differential positioning accuracy of this system is sub-meter level, and the measurement data is stored through the serial port output or U disk, taking into account the requirements of cost and accuracy. The test results show that using this system for area measurement, because of the consistency of the error offset of GPS positioning in a short time, the boundary of the measured area has a good linearity and the relative error is less than 3%, which can provide reliable and precise management for precision agricultural production. Data support. The disadvantage of the designed GPS receiving system is that the interface is simple and the function is relatively simple. Further research should be conducted in the following two areas:
1) Increase the CAN bus interface so that it can be directly connected with the field computer to facilitate the real-time display of positioning data;
2) Built-in coordinate conversion program facilitates real-time data processing.
Motorcycle Engine Gasket,Motorcycle Gasket,Motorcycle Gasket Kit
Shengquan Industrial Corporation Limited , http://www.hn-gasket.com